Sezione 4.1
Macchinari mobili autonomi
Questa sezione analizza gli aspetti legati alla sicurezza dei robot mobili industriali (IMR), come gli AGV e gli AMR. Scoprirai come funzionano questi sistemi, dove si originano i rischi e quali misure di protezione, sia integrate che aggiuntive, sono raccomandate per garantire un’interazione sicura tra le persone e i sistemi di automazione mobile.
Trasporto flessibile con AGV e AMR
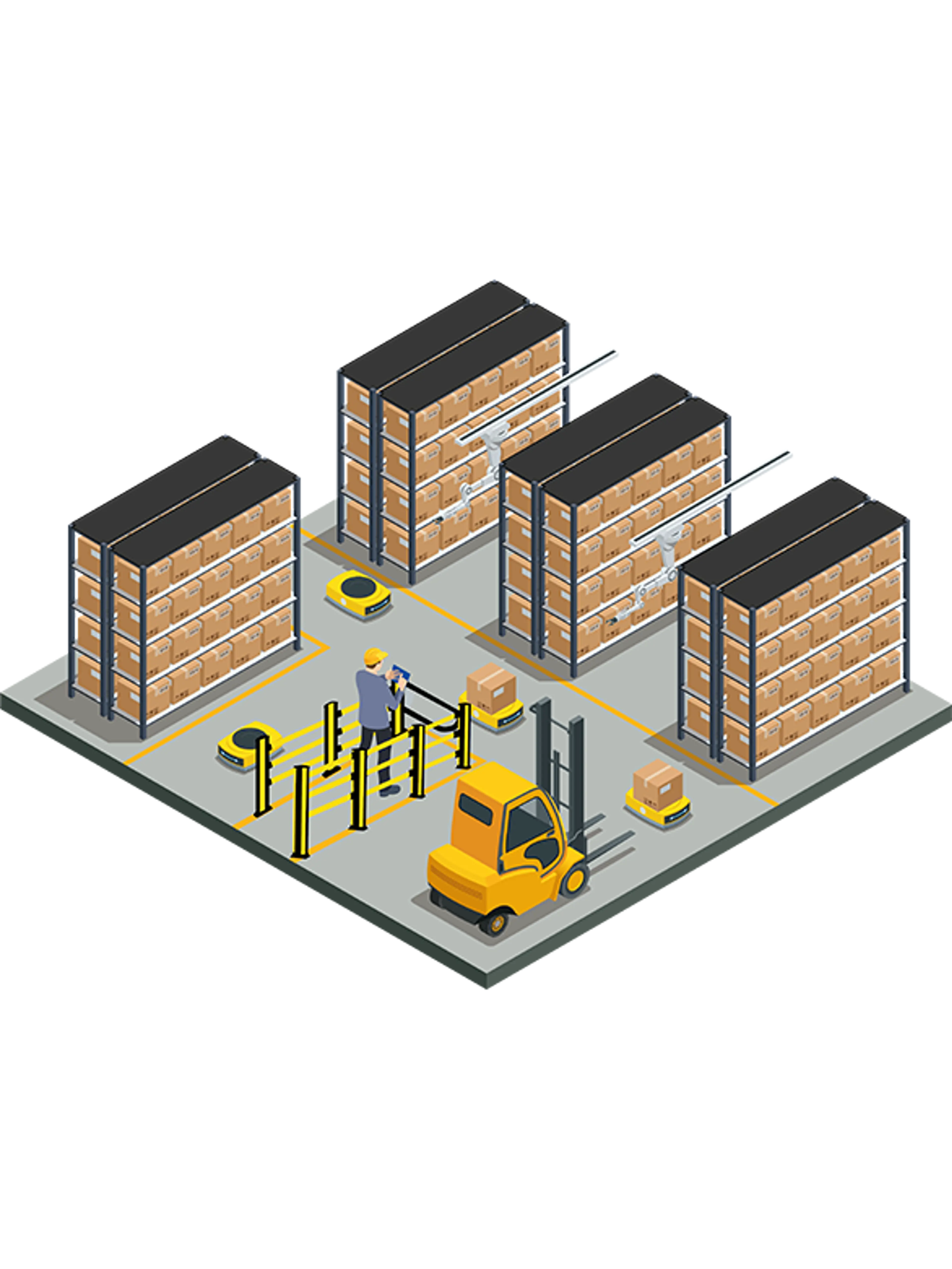
I robot mobili industriali (IMR), come i veicoli a guida automatica (AGV) e i robot mobili autonomi (AMR), possono trasportare diverse unità di stoccaggio da e verso le postazioni di magazzino.
Possono sollevare, trasportare e movimentare pallet, interi scaffali o anche carichi unitari di grandi dimensioni, ma sono più frequentemente utilizzati per scatole, contenitori e vaschette. Sono impiegati principalmente in strategie 'goods to person' per il picking a livello di confezione o singolo articolo, ma possono anche svolgere compiti di trasporto intermedio in uno schema 'person to goods'."

Metodi tipici di movimentazione del carico degli IMR
Ci sono cinque principali modalità con cui gli IMR prelevano e posizionano i carichi (possono essere utilizzate anche combinazioni di queste):
- Gli AGV fungono da carrelli elevatori senza conducente che movimentano pallet.
- Un robot, un sistema di movimentazione lineare o un nastro trasportatore posizionano il carico sopra il veicolo (questi veicoli sono spesso chiamati "undercarts"; possono avere un’altezza molto ridotta, da 50 a 300 mm).
- L’IMR ha un nastro trasportatore sulla parte superiore per il trasferimento del carico; alcuni IMR possono estendere il nastro all’interno di uno scaffale per prelevarlo, mentre delle pinze possono essere utilizzate per aiutare nel prelievo e nel fissaggio.
- L’IMR si posiziona sotto un carico, lo solleva e lo sposta; interi scaffali possono così essere sollevati e trasferiti a una postazione di picking e poi riportati in magazzino (questi sistemi sono spesso chiamati ASRS = Sistemi automatizzati di stoccaggio e prelievo).
- Un robot montato su un IMR preleva gli oggetti, li mette in una scatola o su una piattaforma, li trasporta e poi li posiziona nella destinazione prevista; questi IMR possono anche svolgere funzioni di produzione, come pulizia, lucidatura, ispezione, ecc.
Rischi comuni negli ambienti con IMR
Sebbene gli IMR siano dotati di avanzate caratteristiche di sicurezza, permangono alcuni rischi, soprattutto quando le persone diventano disattente o si abituano alla loro presenza.
In caso di emergenza, i robot mobili possono anche ostruire le vie di fuga. La seguente lista riassume i principali rischi che devono essere attentamente considerati durante la pianificazione e l’implementazione di sistemi IMR:
- Rischio di collisione - impatto o investimento di persone, specialmente quando IMR e pedoni condividono lo spazio o quando i veicoli accedono a postazioni di lavoro manuali.
- Pericolo di passaggio sottostante – gli IMR a bassa altezza possono passare sotto attrezzature o recinzioni se ci sono aperture troppo grandi nel pavimento.
- Schiacciamento/taglio con l’ambiente circostante – in spazi ristretti come scaffalature, corsie strette, porte, macchinari o parti strutturali.
- Rischi nella movimentazione dei carichi – schiacciamento e taglio durante l’attracco, la ricarica o il trasferimento dei carichi.
- Ribaltamento dei carichi – rischio di impatto dovuto a oggetti instabili o cadenti.
- Errori di localizzazione – incidenti causati da guasti o errori di localizzazione, specialmente vicino a scale, rampe, banchine di carico, angoli ciechi, ecc.
- Sensori disattivati – il rilevamento di presenza può essere sospeso durante l’attracco o il trasferimento.
- Persone non rilevate – presenza di persone in punti ciechi fuori dalla portata dei sensori.
- Rischi da apparecchiature aggiuntive – pericoli derivanti da strumenti come nastri trasportatori, pinze o bracci robotici montati sugli IMR.

Caratteristiche di sicurezza e norme degli IMR
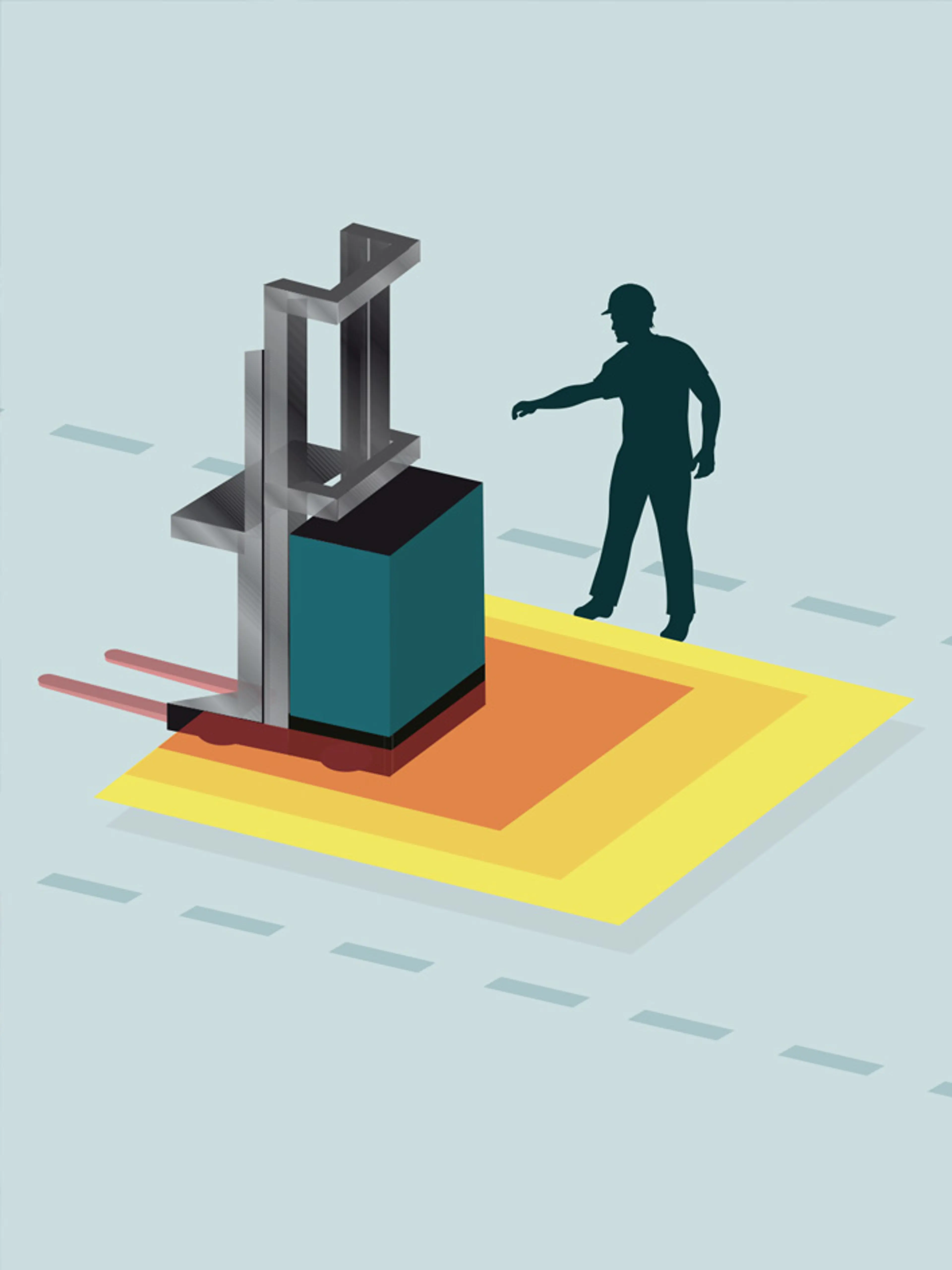
Tutti gli IMR sono dotati di sensori di presenza che prevengono gli incidenti.
I veicoli generalmente si muovono lentamente nelle aree frequentate da persone e si fermano quando incontrano ostacoli o persone sul loro percorso. La maggior parte degli IMR può essere programmata per evitare zone virtuali di accesso limitato o vietato e alcuni sono inoltre dotati di paraurti che interrompono il funzionamento in caso di impatto.
Le caratteristiche di sicurezza passive includono pulsanti di emergenza, luci di segnalazione e segnali acustici. I requisiti di sicurezza per AGV e IMR sono stabiliti nelle norme (EN) ISO 3691-4, ANSI/RIA R15.08-1 e ANSI/ITSDF 56-5 per gli Stati Uniti. Ulteriori informazioni sulle normative si trovano nel capitolo 5.3 Normative di sicurezza industriale.
Sulla base di quanto sopra e supportati da approfondite valutazioni dei rischi, potrebbero essere necessarie le seguenti misure per garantire un ambiente di lavoro sicuro.