Sezione 4.2
Picking automatico
In questa sezione trovi informazioni sui rischi comuni negli ambienti di picking robotizzato e su come ridurli utilizzando misure di protezione come recinzioni, barriere luminose e separazione degli spazi di lavoro. La sezione spiega inoltre che i robot progettati per operazioni collaborative necessitano di ulteriori dispositivi di sicurezza, soprattutto quando utensili o interfacce macchina possono generare rischi inattesi.
Tipologie di robot utilizzati nel picking
I robot vengono sempre più utilizzati per prelevare e posizionare merci e pacchi al fine di completare gli ordini. I robot impiegati possono essere:
- Robot industriali che si muovono ad alta velocità e generalmente gestiscono carichi da medi ad elevati.
- Robot collaborativi (chiamati “cobots”) che sono progettati per muoversi a velocità e con forze tali da non causare danni alle persone in caso di contatto o impatto. In genere, gestiscono carichi più leggeri rispetto ai robot industriali. Tuttavia, la sicurezza delle applicazioni collaborative deve essere analizzata con attenzione, poiché l’utensile montato all’estremità del braccio robotico e l’ambiente operativo possono comunque rappresentare dei pericoli.
Problematiche di sicurezza nelle zone di picking robotizzato
Sebbene i sistemi di picking robotizzato offrano velocità e precisione, introducono anche sfide in termini di sicurezza, soprattutto quando esseri umani e macchine lavorano a stretto contatto.
Il tipo di robot, la configurazione dell’ambiente circostante e gli strumenti utilizzati influenzano tutti il livello di rischio. Di seguito sono riportati alcuni dei pericoli più comuni da tenere in considerazione.
- Come in qualsiasi altra applicazione robotica, i robot industriali presentano un elevato rischio di impatto, schiacciamento, taglio e caduta dei carichi movimentati. Nelle installazioni brownfield, questi rischi possono essere aggravati dalla mancanza di spazio.
- I robot destinati ad applicazioni collaborative sono considerati “sicuri”, ma l’utensile all’estremità del braccio e l’interfacciamento con nastri trasportatori o altri macchinari possono comunque comportare alcuni rischi.
Strategie di sicurezza per tipo di robot
Per ridurre i rischi negli ambienti di picking robotizzato, le misure di sicurezza devono essere adattate al tipo di robot utilizzato.
Mentre i robot industriali richiedono spesso una completa protezione, anche i robot collaborativi possono necessitare di accessi limitati a seconda degli utensili e dell’ambiente circostante. Le strategie seguenti aiutano a garantire un funzionamento sicuro ed efficiente.
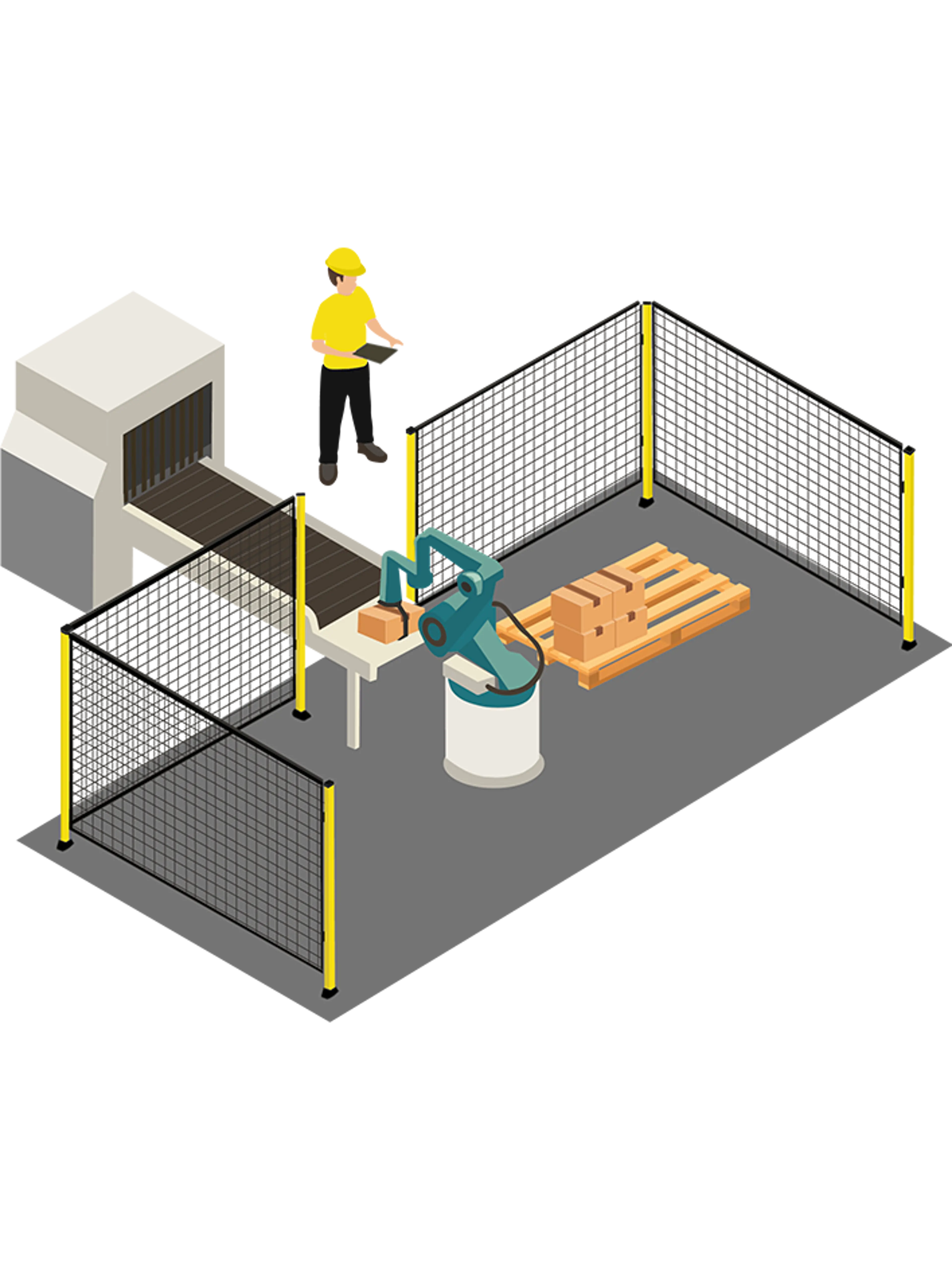
Limita in modo sicuro l’area di movimento dei robot industriali e installa dispositivi di sicurezza.
Utilizza:
- Recinzioni di protezione, barriere luminose, scanner laser o tappeti sensibili (applicare le norme EN ISO 10218-1/-2 o ANSI/RIA R15.06 negli USA).
Limita l’accessibilità delle aree di lavoro collaborative mediante barriere fisiche sui lati che non devono essere raggiunti dagli operatori.
Utilizza:
- Recinzioni di protezione se l’utensile all’estremità del braccio comporta rischi rilevanti.
- Barriere pedonali o barriere “di consapevolezza” più basse per avvisare le persone delle zone da non oltrepassare; questo aiuta anche a “disturbare” il robot il meno possibile, garantendo l’efficienza dell’applicazione.
